《机器学习的数学基础》(4/7)
读书笔记之四:矩阵分解
4、矩阵分解
Matrix Decomposition
在本章中,我们将介绍矩阵的三个方面:如何概括矩阵,如何分解矩阵,以及如何利用矩阵分解进行矩阵近似,矩阵分解的一个类比是因数分解(factoring of numbers)。
4.1 行列式与迹
行列式只适用于方阵。
可以看作是将矩阵映射到一个实数的函数。
当且仅当行列式不等于0时,矩阵可逆。
上三角(下三角)矩阵的行列式是其对角元素的积。
行列式度量体积;列向量代表各条边。
一个方阵 \(\boldsymbol{A} \in \mathbb{R}^{n \times n}\) 的行列式 \(\operatorname{det}(\boldsymbol{A}) \neq 0\),当且仅当 \(\operatorname{rk}(\boldsymbol{A}) = n.\)换句话说,\(\boldsymbol{A}\) 可逆当且仅当它是满秩的
为什么:行列式只适用于方阵。
行列式衡量方阵线性变换的体积(面积、体积、n维体积)对应的变化,而非方阵既不构成同维线性变换,也不满足代数定义,并且可逆只针对方阵有意义。
对于 \(n \times n\) 矩阵的行列式,需要一个通用的算法来解决 \(n > 3\) 的情况,我们将在下面探讨这个问题。定理 4.2 将计算 \(n \times n\) 矩阵的行列式的问题简化为计算 \((n - 1) \times (n - 1)\) 矩阵的行列式。通过递归地应用拉普拉斯展开(Laplace Expansion),我们最终可以通过计算 \(2 \times 2\) 矩阵的行列式来计算 \(n \times n\) 矩阵的行列式。
行列式具有以下特性:
- 矩阵相乘的行列式是相应行列式的乘积,即
\[ \operatorname{det}(\boldsymbol{AB}) = \operatorname{det}(\boldsymbol{A}) \operatorname{det}(\boldsymbol{B}) \]
- 矩阵转置不改变行列式的值,即
\[ \operatorname{det}(\boldsymbol{A}) = \operatorname{det}(\boldsymbol{A}^{\top}) \]
- 如果 \(\boldsymbol{A}\) 是正则的(可逆的),
\[ \operatorname{det}(\boldsymbol{A}^{-1}) = \frac{1}{\operatorname{det}(\boldsymbol{A})} \]
相似矩阵(定义 2.22)具有相同的行列式。因此,对于线性映射 \(\Phi: V \rightarrow V\),\(\Phi\) 的所有变换矩阵 \(\boldsymbol{A}_\Phi\) 都具有相同的行列式。因此,线性映射基的选择不影响行列式的值。(注意前提是\(V \rightarrow V\))
将一列/行的倍数加到另一列/行不会更改 \(\operatorname{det}(\boldsymbol{A})\)。
用标量 \(\lambda \in \mathbb{R}\) 乘矩阵 \(\boldsymbol{A}\) 的行/列,将 \(\lambda\) 倍缩放 \(\operatorname{det}(\boldsymbol{A})\)。特别地,
\[ \operatorname{det}(\lambda \boldsymbol{A}) = \lambda^n \operatorname{det}(\boldsymbol{A}) \]
- 交换两行/列将更改 \(\operatorname{det}(\boldsymbol{A})\) 的符号。
迹
方阵 \(\boldsymbol{A} \in \mathbb{R}^{n \times n}\) 的迹(trace)定义为:
\[ \operatorname{tr}(\boldsymbol{A}) := \sum_{i=1}^{n} a_{ii} \]
即,迹是 \(\boldsymbol{A}\) 的对角元素之和。
迹满足以下属性:
- 对于 \(\boldsymbol{A}, \boldsymbol{B} \in \mathbb{R}^{n \times n}\),有:
\[ tr(A+B)== \operatorname{tr}(\boldsymbol{A}) + \operatorname{tr}(\boldsymbol{B}) \]
- 对于 \(\boldsymbol{A} \in \mathbb{R}^{n \times n}\),\(\alpha \in \mathbb{R}\),有:
\[ tr(αA) = \alpha \operatorname{tr}({A}) \]
- 单位矩阵的迹为:
\[ tr(In) = n \]
- 对于 \(\boldsymbol{A} \in \mathbb{R}^{n \times k}\),\(\boldsymbol{B} \in \mathbb{R}^{k \times n}\),有:
\[ tr(AB)= \operatorname{tr}({B}{A}) \]
可以证明,只有一个函数同时满足这四个性质——即迹(Gohberg et al., 2012)。
线性映射的矩阵表示依赖于基,而线性映射\(\phi\)的迹独立于基。 具体原理见资料《迹的相似不变性.md》
特征多项式:
将行列式和迹作为描述方阵的函数来讨论。
对于 \(\lambda \in \mathbb{R}\) 和一个方阵 \(\boldsymbol{A} \in \mathbb{R}^{n \times n}\),其特征多项式(Characteristic Polynomial)定义为:
\[ p_A(\lambda) := \det(\boldsymbol{A} - \lambda \boldsymbol{I}) = c_0 + c_1 \lambda + c_2 \lambda^2 + \cdots + c_{n-1} \lambda^{n-1} + (-1)^n \lambda^n \]
其中 \(c_0, \ldots, c_{n-1} \in \mathbb{R}\)。特别地,
\[ c_0 = \det(\boldsymbol{A}), \quad c_{n-1} = (-1)^{n-1} \operatorname{tr}(\boldsymbol{A}) \]
特征多项式将允许我们计算特征值和特征向量。
4.2 特征值和特征向量
指向同一方向的两个向量称为共向的(codirected)。如果两个向量指向相同或相反的方向,则它们是共线的(collinear)。
令 \(A \in \mathbb{R}^{n \times n}\) 为一个方阵。
\[ \boldsymbol{A}\boldsymbol{x} = \lambda \boldsymbol{x} \]
我们称这个方程为特征方程(eigenvalue equation)。其中 \(\lambda \in \mathbb{R}\) 为 \(\boldsymbol{A}\) 的特征值(eigenvalue),\(\boldsymbol{x} \in \mathbb{R}^{n} \setminus \{\boldsymbol{0}\}\) 为相应的特征向量(eigenvector)。
以下说法是等效的(个人注:详见《特征值和齐次方程解的关系.md》):
- \(\lambda\) 是 \(\boldsymbol{A} \in \mathbb{R}^{n \times
n}\) 的特征值。
- 存在 \(\boldsymbol{x} \in \mathbb{R}^{n}
\backslash \{\mathbf{0}\}\),使得 \(\boldsymbol{A}\boldsymbol{x} = \lambda
\boldsymbol{x},\) 或等价地 \((\boldsymbol{A} - \lambda \boldsymbol{I}_{n})
\boldsymbol{x} = \mathbf{0}\) 有非平凡解,即 \(\boldsymbol{x} \neq \mathbf{0}\)。
- \(\operatorname{rk}\!\left(\boldsymbol{A}
- \lambda \boldsymbol{I}_{n}\right) < n\)
- \(\det\!\left(\boldsymbol{A} - \lambda \boldsymbol{I}_{n}\right) = 0\)
特征空间和特征谱:
对于 \(A \in \mathbb{R}^{n \times n}\),\(\boldsymbol{A}\) 对应于特征值 \(\lambda\) 的特征向量集合张成 \(\mathbb{R}^{n}\) 的子空间,这个子空间称为 \(\boldsymbol{A}\) 关于 \(\lambda\) 的特征空间(eigenspace),记为:\(E_{\lambda}\) ; \(\boldsymbol{A}\) 的特征值构成的集合称为特征谱(eigenspectrum),或 \(\boldsymbol{A}\) 的谱。
特征值为 0 的特征向量是矩阵零空间中的非零向量;它揭示了矩阵在某些方向上把向量“压扁”为零;
单位矩阵 \(\boldsymbol{I} \in \mathbb{R}^{n \times n}\) 的特征方程为:
\[ P_{I}(\lambda) = \operatorname{det}(\boldsymbol{I} - \lambda \boldsymbol{I}) = (1 - \lambda)^n = 0 \]
它只拥有 \(\lambda = 1\) 这个特征值,并出现 $ n $ 次。而且,对于任意 \(\boldsymbol{x} \in \mathbb{R}^{n} \setminus \{\boldsymbol{0}\}\),有:
\[ \boldsymbol{I} \boldsymbol{x} = \lambda \boldsymbol{x} = 1 \cdot \boldsymbol{x} \]
因此,单位矩阵的唯一特征空间 \(E_1\) 张成 \(n\) 维,\(\mathbb{R}^{n}\) 的 \(n\) 个标准基向量都是 \(\boldsymbol{I}\) 的特征向量。(另外:单位矩阵保持所有方向不变,因此所有方向都是特征向量)。
关于特征值和特征向量的常用特性包括:
矩阵 \(\boldsymbol{A}\) 及其转置 \(\boldsymbol{A}^{\top}\) 具有相同的特征值,但不一定具有相同的特征向量。
特征空间 \(E_{\lambda}\) 是 \(\boldsymbol{A} - \lambda \boldsymbol{I}\) 的零空间,因为:
\[ \boldsymbol{A} \boldsymbol{x} = \lambda \boldsymbol{x} \Longleftrightarrow \boldsymbol{A} \boldsymbol{x} - \lambda \boldsymbol{x} = \boldsymbol{0} \Longleftrightarrow (\boldsymbol{A} - \lambda \boldsymbol{I}) \boldsymbol{x} = \boldsymbol{0} \Longleftrightarrow \boldsymbol{x} \in \ker(\boldsymbol{A} - \lambda \boldsymbol{I}) \]
相似矩阵(定义 2.22)具有相同的特征值。基变换得到的是相似矩阵。因此,线性映射 \(\Phi\) 的特征值与它的变换矩阵的基的选择无关。这使得特征值、行列式和迹成为线性映射的重要不变量。
对称正定矩阵总是有正的实特征值。
假设:
- \(A\) 是一个线性变换在基底\(\mathcal{B}\) 下的矩阵
- 换到另一个基底\(\mathcal{C}\) ,基变换矩阵为 \(P\)
那么在新基底下的矩阵是:
\[ A' = P^{-1} A P \]这就叫 相似矩阵(similar matrix)。
上式右边过程:P作用在新基上坐标转换成旧基坐标,用A做变换,然后转换成新基坐标。详见“线性代数“的“2.8 变量变换和基变换区别“。
剪切映射:
剪切映射(Shearing Mapping)
是一种保持某些几何特征(如面积、体积)不变,但改变形状的线性变换。在二维或三维欧几里得空间中,它通过“滑动”坐标轴方向的某些分量,使图形在不旋转也不缩放的前提下发生倾斜变形。
几何直观:
- 剪切会把一个矩形变成平行四边形。
- 面积保持不变。
- 角度和形状会改变,但线之间的平行关系保持。
- 单位正方形在剪切后变成平行四边形,但底边长度不变。
详见《剪切映射的变换矩阵.md》
一个矩阵 \(\boldsymbol{A} \in \mathbb{R}^{n
\times n}\) 的 \(n\) 个特征向量
\(\boldsymbol{x}_{1}, \ldots,
\boldsymbol{x}_{n}\) 对应 \(n\)
个不同的特征值 \(\lambda_{1}, \ldots,
\lambda_{n}\),则它们是线性独立的。这个定理指出,具有 \(n\) 个不同特征值的矩阵的特征向量构成 \(\mathbb{R}^{n}\) 的一组基。
给定一个矩阵 \(\boldsymbol{A} \in
\mathbb{R}^{m \times n}\),我们总能通过\(\boldsymbol{S} := \boldsymbol{A}^{\top}
\boldsymbol{A}\) 得到一个对称的半正定矩阵\(\boldsymbol{S} \in \mathbb{R}^{n \times
n}\)。
注:很多地方只需要半正定矩阵即可。
4.3 谱定理
Spectral Theorem
如果 \(\boldsymbol{A} \in \mathbb{R}^{n \times n}\) 是对称的,则存在 \(\boldsymbol{A}\) 的特征向量组成向量空间 \(V\) 的一个正交基,且每个特征值都是实数。
谱定理的直接含义是:对称矩阵 \(\boldsymbol{A}\) 存在特征值分解(具有实特征值),并且我们可以由特征向量构造一个标准正交基,使得 \[ \boldsymbol{A} = \boldsymbol{P} \boldsymbol{D} \boldsymbol{P}^{\top}, \] 其中 \(\boldsymbol{D}\) 是对角矩阵,\(\boldsymbol{P}\) 的列是 \(\boldsymbol{A}\) 的单位特征向量,满足 \(\boldsymbol{P}^{\top} \boldsymbol{P} = \boldsymbol{I}\)。
4.4 特征值、特征向量、行列式、迹的联系
定理 4.16:
设矩阵 \(\boldsymbol{A} \in \mathbb{R}^{n \times n}\),则其行列式等于其所有特征值的乘积,即 \[ \det(\boldsymbol{A}) = \prod_{i=1}^{n} \lambda_i \] 其中 \(\lambda_i \in \mathbb{C}\)(可重复)为矩阵 \(\boldsymbol{A}\) 的特征值。
定理 4.17:
设矩阵 \(\boldsymbol{A} \in \mathbb{R}^{n \times n}\),则其迹等于其所有特征值的和,即 \[ \operatorname{tr}(\boldsymbol{A}) = \sum_{i=1}^{n} \lambda_i \] 其中 \(\lambda_i \in \mathbb{C}\)(可重复)为矩阵 \(\boldsymbol{A}\) 的特征值。
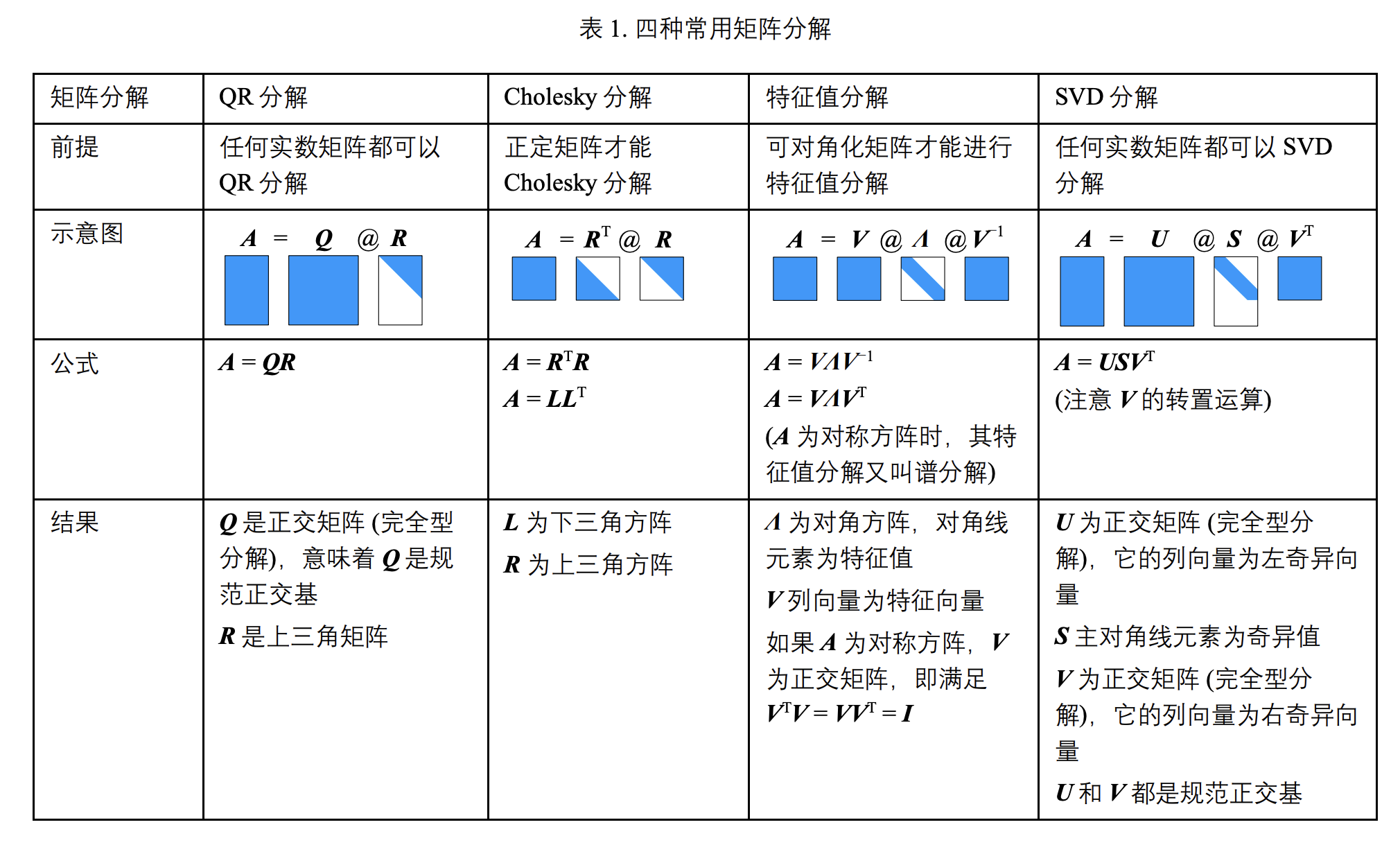
4.5 矩阵分解
Matrix Decomposition
4.5.1 Cholesky分解
对称正定矩阵 \(\boldsymbol{A}\) 可以分解为: \[ \boldsymbol{A} = \boldsymbol{L} \boldsymbol{L}^{\top}, \] 其中 \(\boldsymbol{L}\) 是具有正对角元素的下三角矩阵。 \(\boldsymbol{L}\) 被称为 \(\boldsymbol{A}\) 的Cholesky 因子(Cholesky factor),且是唯一的。对称正定矩阵的类平方根运算,即Cholesky分解。
4.5.2 特征值分解与对角化
矩阵 \(\boldsymbol{A} \in \mathbb{R}^{n \times n}\) 的对角化,实际是在另一个基中表示相同线性映射的一种方法,这个基由 \(\boldsymbol{A}\) 的特征向量组成。
定理 4.20特征值分解,Eigendecomposition
设 \(\boldsymbol{A} \in \mathbb{R}^{n \times n}\),则当且仅当 \(\boldsymbol{A}\) 有 \(n\) 个线性无关的特征向量时,\(\boldsymbol{A}\) 可以被对角化,即存在可逆矩阵 \(\boldsymbol{P}\) 和对角矩阵 \(\boldsymbol{D}\),使得: \[ \boldsymbol{A} = \boldsymbol{P} \boldsymbol{D} \boldsymbol{P}^{-1} \]
其中:\(\boldsymbol{P} \in \mathbb{R}^{n \times n}\) 的列是 \(\boldsymbol{A}\) 的 \(n\) 个线性无关的特征向量;\(\boldsymbol{D}\) 是对角矩阵,其对角元素为 \(\boldsymbol{A}\) 的特征值(可重复);因此,只有当 \(\boldsymbol{A}\) 的特征向量张成 \(\mathbb{R}^n\),即 \(\boldsymbol{A}\) 是非亏损的,\(\boldsymbol{A}\) 才可以对角化。
定理 4.21对称矩阵的特征值分解
设 \(\boldsymbol{S} \in \mathbb{R}^{n \times n}\) 是对称矩阵(即 \(\boldsymbol{S}^{\top} = \boldsymbol{S}\)),则 \(\boldsymbol{S}\) 一定可以被对角化。
根据谱定理,对于任意对称矩阵 \(\boldsymbol{S}\),存在一个标准正交基,由 \(\boldsymbol{S}\) 的特征向量构成。即存在正交矩阵 \(\boldsymbol{P}\),使得:
\[ \boldsymbol{S} = \boldsymbol{P} \boldsymbol{D} \boldsymbol{P}^\top \]
其中:
- \(\boldsymbol{P} \in \mathbb{R}^{n \times n}\) 是正交矩阵,列向量为单位正交的特征向量;
- \(\boldsymbol{D}\) 是对角矩阵,对角元素为 \(\boldsymbol{S}\) 的特征值;
- 此分解方式也可表示为 \(\boldsymbol{D} = \boldsymbol{P}^\top \boldsymbol{S} \boldsymbol{P}\)。
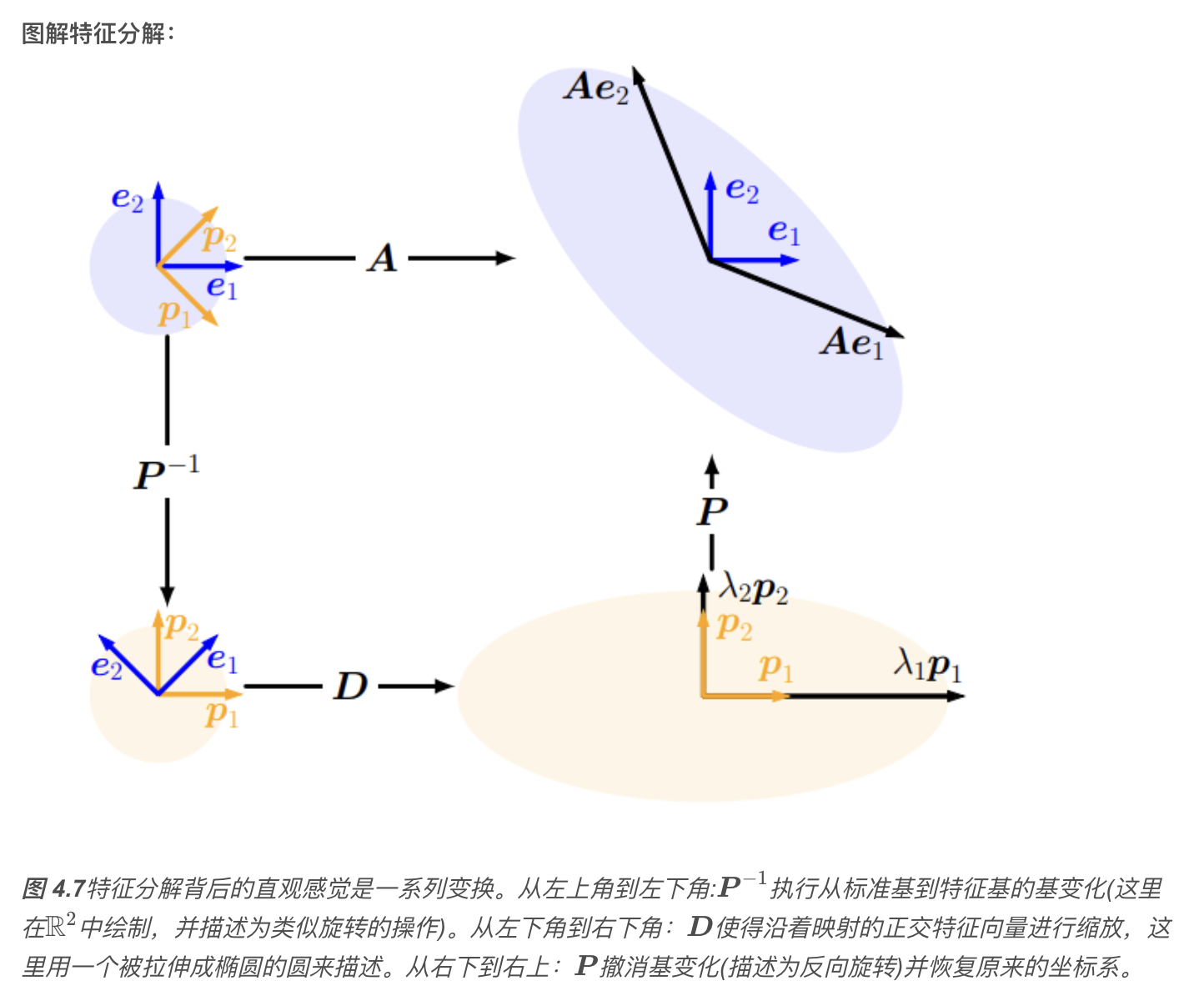
在相同的向量空间中应用相同的基变化,然后撤消。
4.5.3 奇异值分解
singular value decomposition, SVD
表示线性映射 \(\Phi: V \rightarrow W\) 的矩阵 \(\boldsymbol{A}\) 的奇异值分解量化了这两个向量空间的潜在几何变化。
奇异值分解(SVD)公式
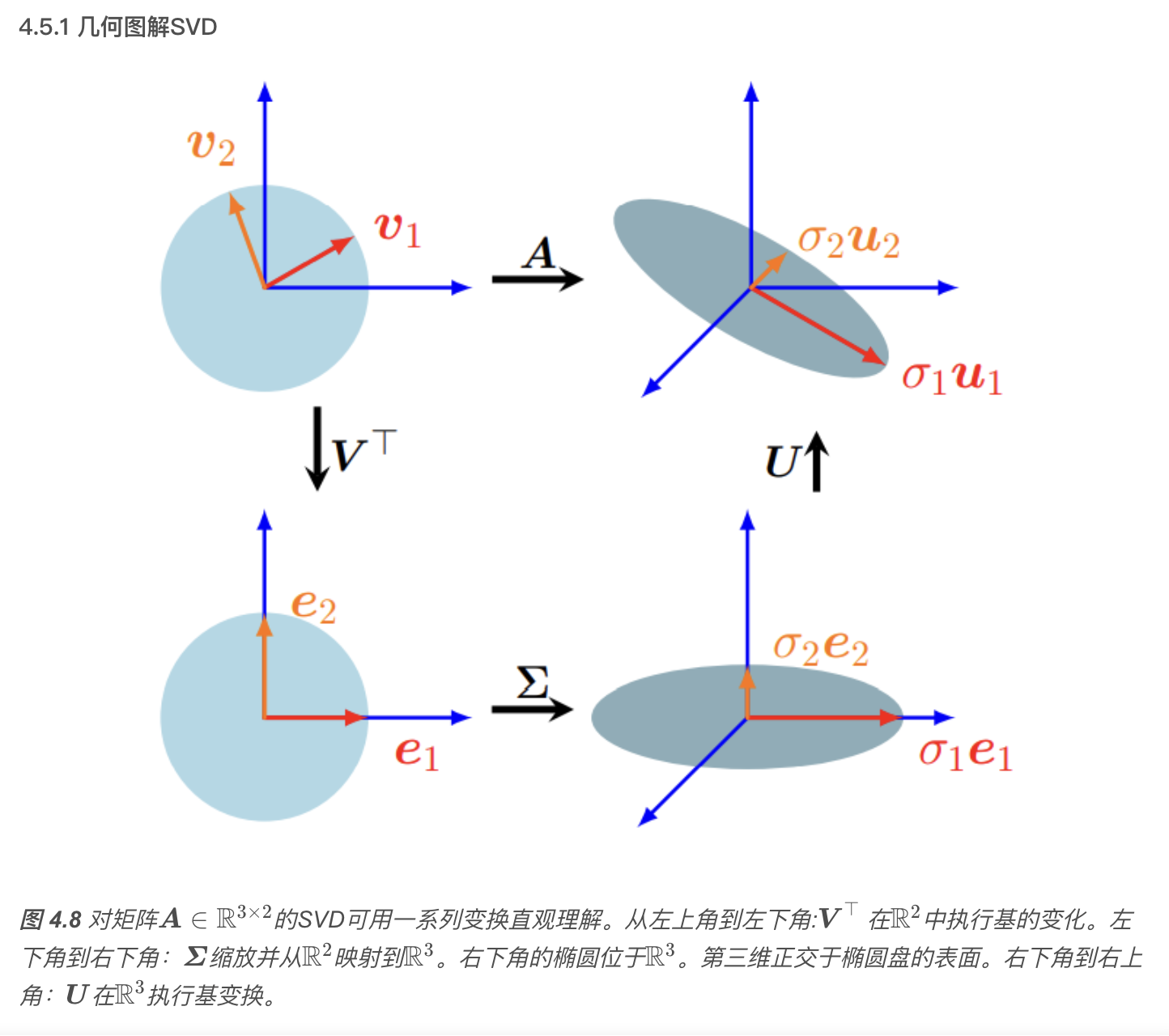
\[ \boldsymbol{A} = \boldsymbol{U} \boldsymbol{\Sigma} \boldsymbol{V}^\top \]
以及它在几何上的意义(旋转+缩放+旋转).
其中 \(\boldsymbol{U} \in \mathbb{R}^{m \times m}\) 为正交矩阵,其列向量为 \(\boldsymbol{u}_i, \ i=1, \ldots, m\);\(\boldsymbol{V} \in \mathbb{R}^{n \times n}\) 也为正交矩阵,其列向量为\(\boldsymbol{v}_i, \ i=1, \ldots, n\)。另外,\(\boldsymbol{\Sigma}\) 为 \(m \times n\) 矩阵,且\(\Sigma_{ii} = \sigma_i \geqslant 0, \quad \Sigma_{ij} = 0, \ i \neq j .\) \(\boldsymbol{\Sigma}\) 的对角元素\(\sigma_i, \quad i = 1, \ldots, r\)称为奇异值(singular values),\(\boldsymbol{u}_i\) 称为左奇异向量(left-singular vectors),\(\boldsymbol{v}_i\) 称为右奇异向量(right-singular vectors)。按照惯例,奇异值是有序的:\(\sigma_1 \geqslant \sigma_2 \geqslant \cdots \geqslant \sigma_r \geqslant 0 .\)
奇异值矩阵 \(\boldsymbol{\Sigma}\) 是唯一的。需要注意 \(\boldsymbol{\Sigma} \in \mathbb{R}^{m \times n}\) 是矩形的,且与 \(\boldsymbol{A}\) 尺寸相同。这意味着 \(\boldsymbol{\Sigma}\) 有一个包含奇异值的对角子矩阵,其他元素为零。
注1:SVD 对任意 \(\boldsymbol{A} \in \mathbb{R}^{m \times
n}\) 都成立。
注2:旋转矩阵就是一个行列式为 \(+1\) 的正交矩阵,也就是: \(R^\top R = I, \quad \det(R) = 1\)
注3:标准正交基(ONB)
注4:左奇异向量和右奇异向量的直观理解,详见《SVD
中的左奇异向量和右奇异向量.md》
4.5.4 特征值分解 vs. 奇异值分解
考虑特征值分解 \[ \boldsymbol{A} = \boldsymbol{P} \boldsymbol{D} \boldsymbol{P}^{-1} \] 和奇异值分解 \[ \boldsymbol{A} = \boldsymbol{U} \boldsymbol{\Sigma} \boldsymbol{V}^{-1}, \] 下面回顾一下它们的核心内容:
对于任意矩阵 \(\mathbb{R}^{m \times n}\),奇异值分解总是存在的。而特征值分解仅对方阵 \(\mathbb{R}^{n \times n}\) 有效,并且仅当我们能找到 \(\mathbb{R}^n\) 的特征向量的基时才存在。
特征值分解矩阵 \(\boldsymbol{P}\) 中的向量不一定是正交的,即基的变化不是简单的旋转和缩放。而另一方面,奇异值分解中矩阵 \(\boldsymbol{U}\) 和 \(\boldsymbol{V}\) 中的向量是正交的,因此它们确实表示旋转。
特征值分解和奇异值分解都是三个线性映射的组合:
- 定义域的基变换;
- 每个新基向量的缩放都是独立的,并从定义域映射到陪域;
- 陪域的基变换。 特征值分解和奇异值分解的一个关键区别是,在奇异值分解中,定义域和陪域可以是不同维数的向量空间。
在奇异值分解中,左奇异向量矩阵 \(\boldsymbol{U}\) 和右奇异向量矩阵 \(\boldsymbol{V}\) 通常不是互逆的(它们在不同的向量空间中执行基变换)。在特征值分解中,基变化矩阵 \(\boldsymbol{U}\) 和 \(\boldsymbol{U}^{-1}\) 是互逆的。
在奇异值分解中,对角矩阵 \(\boldsymbol{\Sigma}\) 中的项都是实的、非负的,这对于特征值分解中的对角矩阵则不一定成立。
奇异值分解和特征值分解通过它们的投影关系密切相关:
- \(\boldsymbol{A}\) 的左奇异向量是 \(\boldsymbol{A} \boldsymbol{A}^\top\) 的特征向量;
- \(\boldsymbol{A}\) 的右奇异向量是 \(\boldsymbol{A}^\top \boldsymbol{A}\) 的特征向量;
- \(\boldsymbol{A}\) 的非零奇异值是 \(\boldsymbol{A} \boldsymbol{A}^\top\) 和 \(\boldsymbol{A}^\top \boldsymbol{A}\) 的非零特征值的平方根。
对于对称矩阵 \(\boldsymbol{A} \in \mathbb{R}^{n \times n}\),特征值分解和奇异值分解是相同的,这符合谱定理(定理 4.15)。
4.5.5 矩阵逼近
我们可以使用奇异值分解(SVD)将秩\(r\) 矩阵\(\boldsymbol{A}\)降为秩 \(k\) 矩阵 \(\widehat{\boldsymbol{A}}\) ,这是一种取主要成分并达到最优的(在谱范数意义上)方式。我们可以将秩\(k\)矩阵对\(\boldsymbol{A}\)的逼近解释为有损压缩的一种方法。因此,矩阵的低秩逼近出现在许多机器学习应用中,例如图像处理、噪声滤波和不适定问题的正则化。此外,它在降维和主成分分析中起着关键作用
秩为 \(r\) 的矩阵 \(\boldsymbol{A} \in \mathbb{R}^{m \times n}\) 能被写成秩 \(1\) 矩阵 \(\boldsymbol{A}_i\) 的和: \[ \boldsymbol{A} = \sum_{i=1}^{r} \sigma_{i} \boldsymbol{u}_{i} \boldsymbol{v}_{i}^{\top} = \sum_{i=1}^{r} \sigma_{i} \boldsymbol{A}_{i}, \] 其中,外积矩阵 \(\boldsymbol{A}_{i}\) 的权重为第 \(i\) 个奇异值 \(\sigma_{i}\)。
4.6 矩阵分类关系图
Matrix Phylogeny
可对角化其实就是可特征值分解。
注:英文对应的中文翻译见文后。
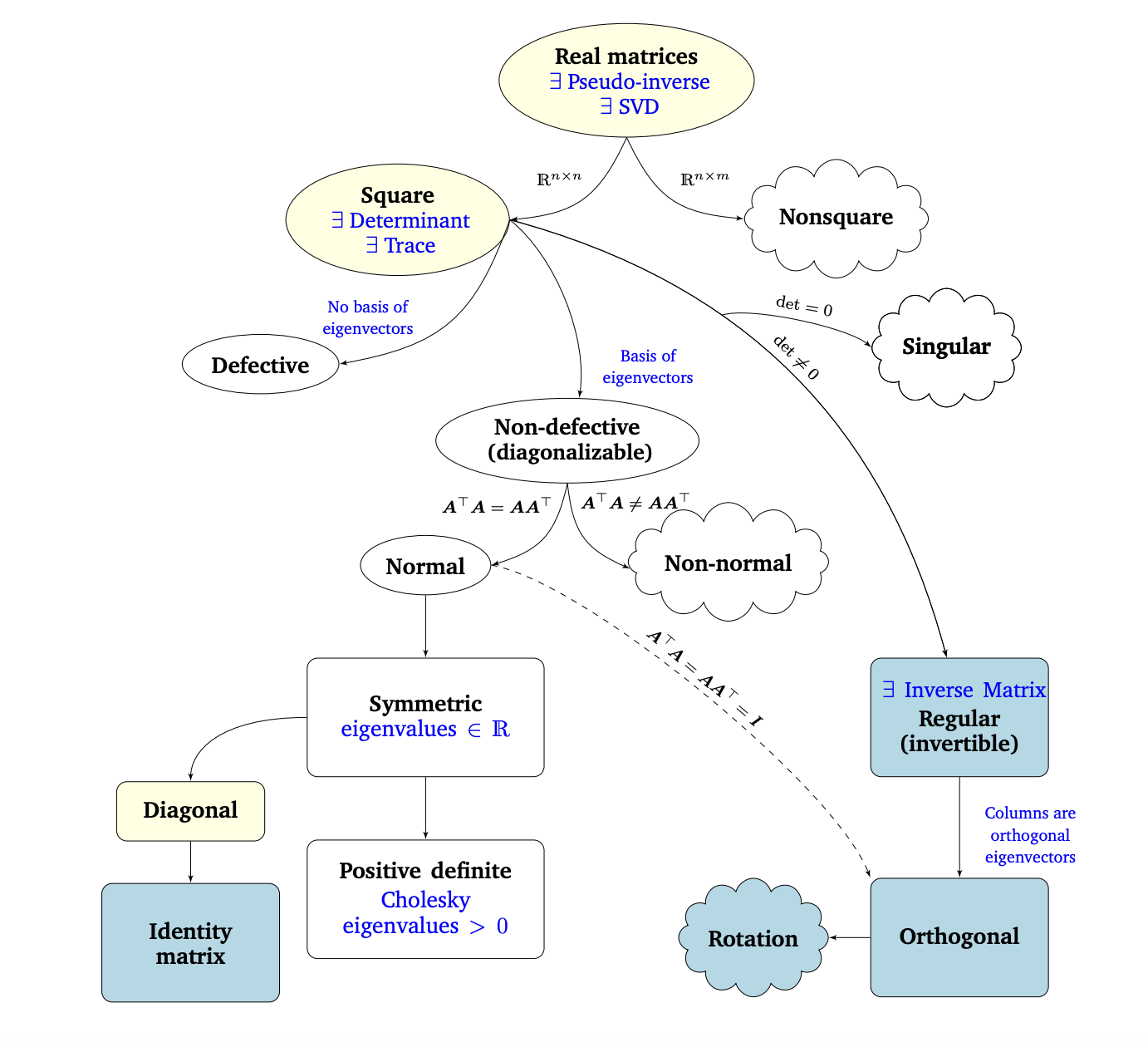
在第2章和第3章中,我们介绍了线性代数和解析几何的基础知识。在这一章中,我们研究了矩阵和线性映射的基本特征。图4.13描述了不同类型矩阵之间关系的 Phylogeny(黑色箭头表示子集)以及我们可以对其执行的操作(蓝色)。
我们考虑所有实矩阵(real matrices)\(\boldsymbol{A} \in \mathbb{R}^{n \times m}\)。对于非方阵(其中 \(n \neq m\)),奇异值分解总是存在的,正如我们在本章中看到的。以方阵(square matrices)\(\boldsymbol{A} \in \mathbb{R}^{n \times n}\) 为中心,行列式告诉我们方阵是否具有逆矩阵(inverse matrix),即它是否属于正则可逆矩阵类。如果 \(n \times n\) 矩阵具有 \(n\) 个线性无关的特征向量,则矩阵是非退化的(non-defective),并且存在特征值分解(定理4.12)。我们知道,重复的特征值可能导致矩阵退化,这种矩阵是不能对角化的。
非奇异矩阵和非退化矩阵是不同的。例如,旋转矩阵是可逆的(行列式是非零的),但不一定可对角化(特征值不能保证是实数)。例子详见《非奇异矩阵和非退化矩阵.md》
我们进一步研究了非退化 \(n \times n\) 方阵的分支。如果条件\(\boldsymbol{A}^{\top} \boldsymbol{A} = \boldsymbol{A} \boldsymbol{A}^{\top}\)成立,则 \(\boldsymbol{A}\) 是正规的(normal)。此外,如果更严格的条件\(\boldsymbol{A}^{\top} \boldsymbol{A} = \boldsymbol{A} \boldsymbol{A}^{\top} = \boldsymbol{I}\)成立,则 \(\boldsymbol{A}\) 称为正交(orthogonal,见定义3.8)。正交矩阵集是正则(可逆)矩阵的子集,满足\(\boldsymbol{A}^{\top} = \boldsymbol{A}^{-1}.\)
正规矩阵有一个常见的子集,即对称矩阵 \(\boldsymbol{S} \in \mathbb{R}^{n \times n}\),它满足\(\boldsymbol{S} = \boldsymbol{S}^{\top}.\)对称矩阵只有实特征值。对称矩阵的子集由正定矩阵 \(\boldsymbol{P}\) 组成,正定矩阵 \(\boldsymbol{P}\) 对所有 \(\boldsymbol{x} \in \mathbb{R}^{n} \backslash \{\mathbf{0}\}\) 满足条件\(\boldsymbol{x}^{\top} \boldsymbol{P} \boldsymbol{x} > 0.\)在这种情况下,存在唯一的 Cholesky 分解(Cholesky decomposition,定理4.18)。正定矩阵只有正特征值且总是可逆的(即,具有非零行列式)。
对称矩阵的另一个子集由对角矩阵(diagonal matrices)\(\boldsymbol{D}\) 组成。对角矩阵在乘法和加法下是闭合的,但不一定形成一个群(只有当所有的对角项都不为零时才是这种情况,这样矩阵才是可逆的)。一种特殊的对角矩阵是单位矩阵 \(\boldsymbol{I}\)。
上表来源《鸢尾花套书》Book4_ch24 “矩阵力量”
矩阵分类关系图的英文翻译:
| English | 中文 | 说明(可选) |
|---|---|---|
| No basis of eigenvectors | 特征向量不是基 | 不可对角化 |
| Basis of eigenvectors | 特征向量是基 | 可对角化 |
| Singular | 奇异的 | \(\det=0\) ,不可逆 |
| Regular | 正则的 | 可逆矩阵 |
| Defective | 退化的 | 不具备完备特征向量组 |
| Square | 方阵 | 行数 = 列数 |
| Normal | 正规的 | \(A^TA = AA^T\) |
| Symmetric | 对称的 | \(A = A^T\) |
| Diagonal | 对角的 | 主对角线以外全是0 |
| Identity matrix | 单位矩阵 | \(I\) |
| Orthogonal | 正交的 | \(A^TA = I\) |
| Rotation | 旋转矩阵 | 正交且 $ =+1$ |
| Positive definite | 正定的 | 特征值 > 0 |
| Eigenvalues | 特征值 | — |
全书的读书笔记(共7篇)如下:
《机器学习的数学基础》读书笔记之一 :导言
《机器学习的数学基础》读书笔记之二 :线性代数
《机器学习的数学基础》读书笔记之三 :解析几何
《机器学习的数学基础》读书笔记之四 :矩阵分解
《机器学习的数学基础》读书笔记之五 :向量微积分
《机器学习的数学基础》读书笔记之六 :概率与分布
《机器学习的数学基础》读书笔记之七 :连续优化