《机器学习的数学基础》(5/7)
读书笔记之五:向量微积分
5、向量微积分
Vector Calculus
函数的梯度方向指向最陡峭的上升方向,而不是导数本身。导数是标量,没有方向性;梯度才是决定函数与曲面上升方向的向量。理解这一点有助于区分函数与其图像(曲面)之间的关系。详见《导数和梯度的概念.md》
5.1 泰勒级数
泰勒级数是函数\(f\)的无穷项和的表示。这些项是用\(f\)的导数来确定的。多项式逼近函数的泰勒级数。
泰勒级数
对于一个平滑的函数 $ f ^{}, f: $ ($ f ^{} $ 表示 \(f\) 连续且可微无穷多次), \(f\) 在 \(x_0\) 的泰勒级数(Taylor
series)定义为:
\[
T_{\infty}(x) = \sum_{k=0}^{\infty} \frac{f^{(k)}\left(x_{0}\right)}{k
!} \left(x - x_{0}\right)^{k}
\]
当 $ x_0 = 0 $ 时,我们得到麦克劳林级数(Maclaurin series),它是泰勒级数的特殊实例。 如果 $ f(x) = T_{}(x) $,那么 \(f\) 称为解析的(analytic)。
泰勒级数中的 \(x_0\)(也叫展开点)原则上可以选任意实数或复数,不过能不能用它准确表示函数,还得看收敛性和函数的可导性条件。
注1: 一般来说,$ n $ 次泰勒多项式是非多项式函数的近似值。 它在 \(x_0\) 附近与 \(f\) 相似。 然而,$ n $ 次泰勒多项式用 $ k n $ 次多项式表示 \(f\) 已经足够精确了, 因为导数 $ f^{(i)}, i > k $ 可能为 \(0\)。
注2: 泰勒级数是幂级数的特例,幂级数表达式为:
\[
f(x) = \sum_{k=0}^{\infty} a_{k} (x - c)^{k}
\] 其中 \(a_k\)为系数,\(c\)为常数。定义5.4中的式子是它的特殊形式。
注3:组合符号 \(C_n^m\) 也可写成 \(\binom{n}{m}\)。
5.2 微分法则
下面,我们用 $ f' $ 表示 \(f\) 的导数,简要地说明基本的微分规则:
- 乘积法则:
\[ (f(x) g(x))' = f'(x) g(x) + f(x) g'(x) \]
- 除法法则:
\[ \left(\frac{f(x)}{g(x)}\right)' = \frac{f'(x) g(x) - f(x) g'(x)}{\left(g(x)\right)^{2}} \]
- 加法法则:
\[ (f(x) + g(x))' = f'(x) + g'(x) \]
- 链式法则:
\[ (g(f(x)))' = (g \circ f)'(x) = g'(f(x)) \cdot f'(x) \]
这里,$ g f $ 表示函数复合:
\[
x \mapsto f(x) \mapsto g(f(x))
\]
5.3 偏微分与梯度
导数对多变量函数的推广是梯度(gradient)。
我们通过一次改变一个变量并保持其他变量不变来求函数\(f\)相对于\(x\)的偏导数。梯度就是这些偏导数(partial derivatives)构成的的集合。
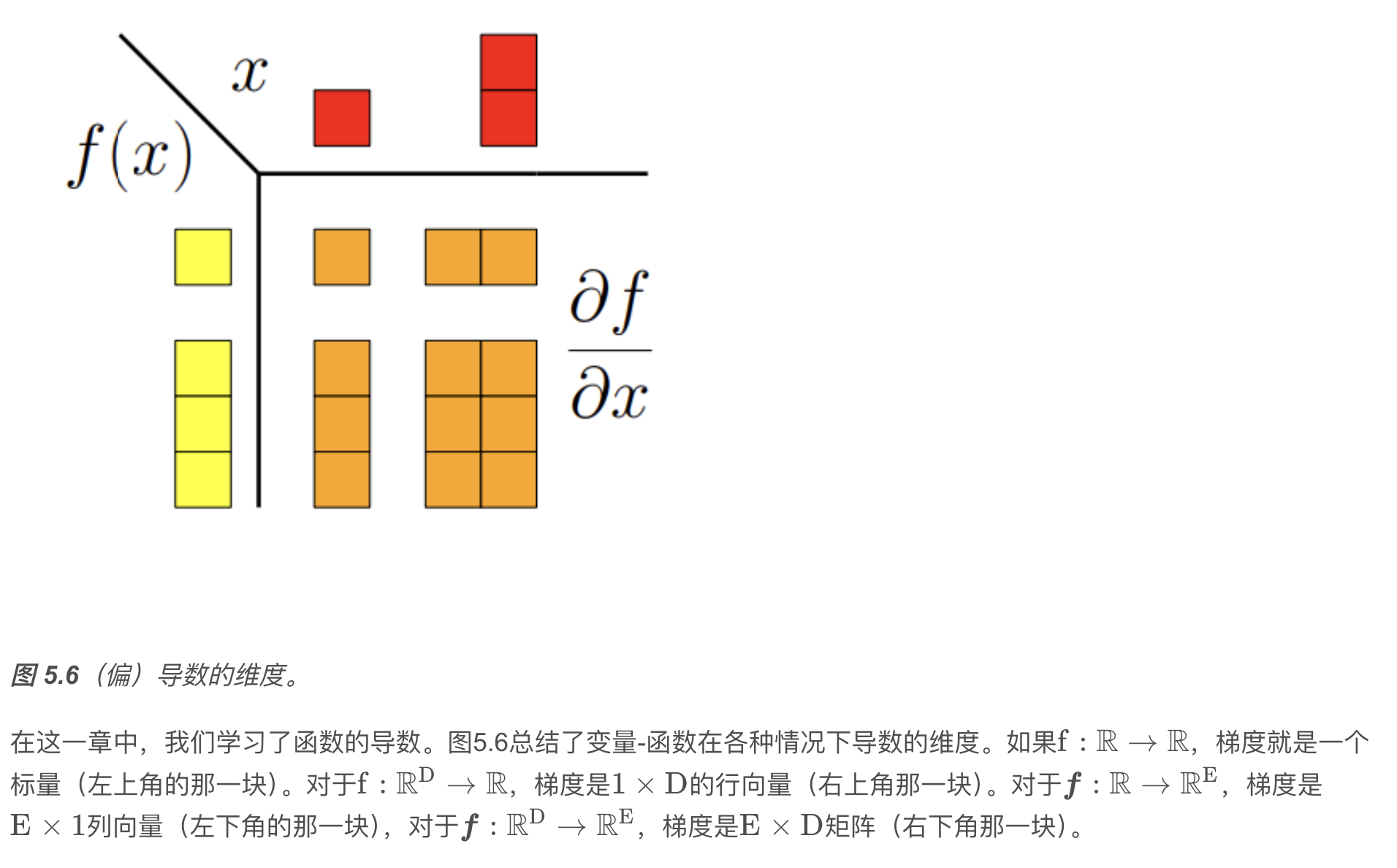
将它们组成一个行向量: \[ \nabla_{\boldsymbol{x}} f = \operatorname{grad} f = \frac{\mathrm{d} f}{\mathrm{d} \boldsymbol{x}} = \left[ \frac{\partial f(\boldsymbol{x})}{\partial x_{1}},\ \frac{\partial f(\boldsymbol{x})}{\partial x_{2}},\ \cdots,\ \frac{\partial f(\boldsymbol{x})}{\partial x_{n}} \right] \in \mathbb{R}^{1 \times n} \qquad (5.40) \]
其中 $ n $ 是变量个数,\(1\) 是 \(f\) 的像/值域/陪域的维数。 这里,我们定义了列向量\(\boldsymbol{x} = \left[ x_{1}, \ldots, x_{n} \right]^{\top} \in \mathbb{R}^n.\) 式 (5.40) 中的行向量称为 \(f\) 的梯度(gradient) 或 雅可比矩阵(Jacobian),是第 5.1 节中导数的推广。
备注(梯度用行向量表示):
向量通常用列向量表示,将梯度向量定义为列向量在文献中并不少见。 我们将梯度向量定义为行向量的原因有两个: 首先,我们可以一致地将梯度推广到向量值函数\(f: \mathbb{R}^{n} \rightarrow \mathbb{R}^{m}\)(然后梯度变成矩阵)。 其次,我们可以很方便地应用多变量链式法则,而不必注意梯度的维数。
5.3.1 链式法则
考虑两个变量 \(x_{1}\), \(x_{2}\) 的函数\(f: \mathbb{R}^{2} \rightarrow \mathbb{R}.\)此外,\(x_{1}(t)\) 和 \(x_{2}(t)\) 本身就是 \(t\) 的函数。 为了计算 \(f\) 相对于 \(t\) 的导数,我们需要对多元函数使用链式法则: \[ \frac{\mathrm{d} f}{\mathrm{d} t} = \begin{bmatrix} \frac{\partial f}{\partial x_{1}} & \frac{\partial f}{\partial x_{2}} \end{bmatrix} \begin{bmatrix} \frac{\partial x_{1}(t)}{\partial t} \\ \frac{\partial x_{2}(t)}{\partial t} \end{bmatrix} = \frac{\partial f}{\partial x_{1}} \frac{\partial x_{1}}{\partial t} + \frac{\partial f}{\partial x_{2}} \frac{\partial x_{2}}{\partial t}. \] 其中 \(\mathrm{d}\) 表示全导数,\(\partial\) 表示偏导数。
5.3.2 多变量链式法则
如果 \(f(x_{1}, x_{2})\) 是 \(x_{1}\) 和 \(x_{2}\) 的函数,其中 \(x_{1}(s, t)\) 和 \(x_{2}(s, t)\) 是两个变量 \(s\) 和 \(t\) 的函数,则用链式法则可得偏导数: \[ \frac{\partial f}{\partial s} = \frac{\partial f}{\partial x_{1}} \frac{\partial x_{1}}{\partial s} + \frac{\partial f}{\partial x_{2}} \frac{\partial x_{2}}{\partial s}, \]
\[ \frac{\partial f}{\partial t} = \frac{\partial f}{\partial x_{1}} \frac{\partial x_{1}}{\partial t} + \frac{\partial f}{\partial x_{2}} \frac{\partial x_{2}}{\partial t}. \]
将梯度写成矩阵乘法的形式为: \[ \frac{\mathrm{d} f}{\mathrm{d}(s, t)} = \frac{\partial f}{\partial \boldsymbol{x}} \frac{\partial \boldsymbol{x}}{\partial (s, t)} = \underbrace{ \begin{bmatrix} \frac{\partial f}{\partial x_{1}} & \frac{\partial f}{\partial x_{2}} \end{bmatrix} }_{\frac{\partial f}{\partial \boldsymbol{x}}} \underbrace{ \begin{bmatrix} \frac{\partial x_{1}}{\partial s} & \frac{\partial x_{1}}{\partial t} \\ \frac{\partial x_{2}}{\partial s} & \frac{\partial x_{2}}{\partial t} \end{bmatrix} }_{\frac{\partial \boldsymbol{x}}{\partial (s, t)}}. \]
这种将链式法则写成矩阵乘法的简洁方法,只有在将梯度定义为行向量时才直接成立。否则,需要对矩阵进行转置以匹配维数。当对象是向量或矩阵时,转置很简单;但当对象是张量时(将在后面讨论),转置就不再是小事了。
5.4 向量值函数的梯度
雅可比矩阵
向量值函数的所有一阶偏导数的集合称为雅可比矩阵(Jacobian)。雅可比矩阵 \(\mathbf{J}\) 是一个 \(m \times n\) 矩阵,我们将其定义如下: \[ \mathbf{J} = \nabla_{\mathbf{x}} \mathbf{f} = \frac{\mathrm{d} \mathbf{f}(\mathbf{x})}{\mathrm{d} \mathbf{x}} = \left[ \frac{\partial \mathbf{f}(\mathbf{x})}{\partial x_{1}} \quad \cdots \quad \frac{\partial \mathbf{f}(\mathbf{x})}{\partial x_{n}} \right]. \]
具体写成矩阵形式为: \[ \begin{equation} \mathbf{J} = \begin{bmatrix} \dfrac{\partial f_{1}(\mathbf{x})}{\partial x_{1}} & \cdots & \dfrac{\partial f_{1}(\mathbf{x})}{\partial x_{n}} \\ \vdots & \ddots & \vdots \\ \dfrac{\partial f_{m}(\mathbf{x})}{\partial x_{1}} & \cdots & \dfrac{\partial f_{m}(\mathbf{x})}{\partial x_{n}} \end{bmatrix}, \tag{5.58} \end{equation} \] 其中 \[ \mathbf{x} = \begin{bmatrix} x_{1} \\ \vdots \\ x_{n} \end{bmatrix}, \quad J(i,j) = \frac{\partial f_{i}}{\partial x_{j}}. \]
雅可比矩阵表示我们想要的坐标变换。如果坐标变换是线性的(如我们的例子),那么它是精确的,(5.66)精确地恢复了(5.62)中的基变化矩阵。如果坐标变换是非线性的,雅可比矩阵则用一个线性变换局部地逼近这个非线性变换。雅可比行列式 \(|\operatorname{det}(\boldsymbol{J})|\) 的绝对值是变换坐标时面积或体积的缩放因子。
方法一、
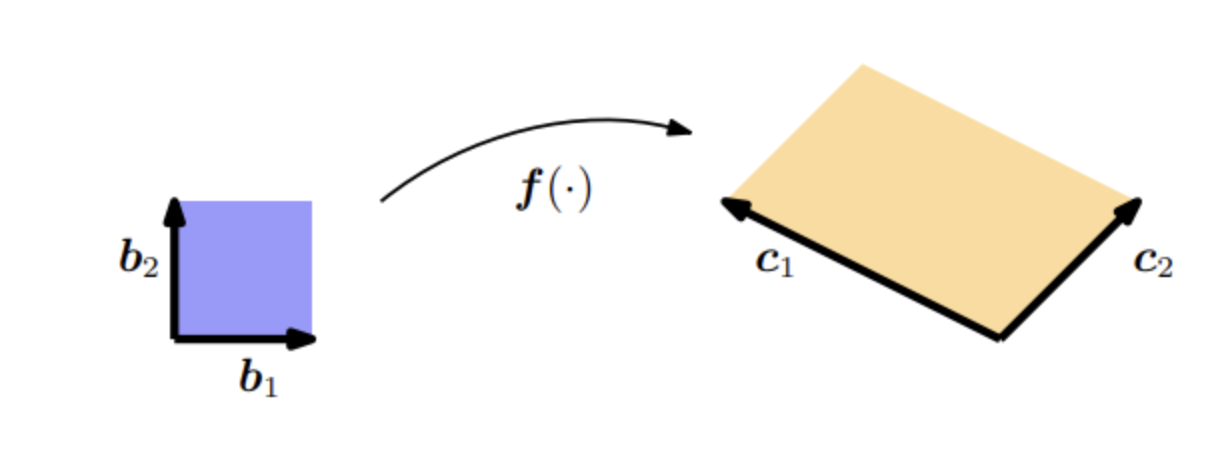
为了开始使用线性代数的方法,我们首先确定 \(\{\boldsymbol{b}_{1}, \boldsymbol{b}_{2}\}\) 和 \(\{\boldsymbol{c}_{1}, \boldsymbol{c}_{2}\}\) 都是 \(\mathbb{R}^2\) 的基。我们要有效地执行的是从 \(\{\boldsymbol{b}_{1}, \boldsymbol{b}_{2}\}\) 到 \(\{\boldsymbol{c}_{1}, \boldsymbol{c}_{2}\}\) 的基变换,就得寻找实现基变换的变换矩阵。 利用第2.7.2节的结果,我们确定了所需的基变换矩阵为: \[ \boldsymbol{J} = \begin{bmatrix} -2 & 1 \\ 1 & 1 \end{bmatrix} \tag{5.62} \]
它使得 \(\boldsymbol{J}\boldsymbol{b}_{1} = \boldsymbol{c}_{1}, \quad \boldsymbol{J}\boldsymbol{b}_{2} = \boldsymbol{c}_{2}\)。 矩阵 \(\boldsymbol{J}\) 的行列式的绝对值为: \[ \left|\det(\boldsymbol{J})\right| = 3, \] 这正是我们在寻找的缩放因子。也就是说, \((\boldsymbol{c}_{1}, \boldsymbol{c}_{2})\) 所张成的平行四边形的面积是 \((\boldsymbol{b}_{1}, \boldsymbol{b}_{2})\) 所张成面积的三倍。
把 \(\{\boldsymbol{b}_{1}, \boldsymbol{b}_{2}\}\) 坐标变换成 \(\{\boldsymbol{c}_{1}, \boldsymbol{c}_{2}\}\) 的坐标,是左乘\(\boldsymbol{J}^{-1}\);反向是左乘\(\boldsymbol{J}\)。
方法二、
线性代数方法适用于线性变换;对于非线性变换(与第6.7节有关),我们有基于偏微分的更一般的方法。
在这种方法中,我们考虑执行变量变换的函数\(\boldsymbol{f}: \mathbb{R}^{2} \rightarrow \mathbb{R}^{2}.\)在我们的例子中,\(\boldsymbol{f}\) 将关于 \((\boldsymbol{b}_{1}, \boldsymbol{b}_{2})\) 的任意向量 \(\boldsymbol{x} \in \mathbb{R}^{2}\) 的坐标映射到关于 \((\boldsymbol{c}_{1}, \boldsymbol{c}_{2})\) 的坐标 \(\boldsymbol{y} \in \mathbb{R}^{2}\)。 我们想确定这个映射,这样就可以计算出一个面积(或体积)在 \(\boldsymbol{f}\) 变换下是如何变化的。 为此,我们需要找出 \(\boldsymbol{f}(\boldsymbol{x})\) 在 \(\boldsymbol{x}\) 微小变化时的变化方式。 雅可比矩阵 \[ \frac{\mathrm{d} \boldsymbol{f}}{\mathrm{d} \boldsymbol{x}} \in \mathbb{R}^{2 \times 2} \] 正是这个问题的答案。 由下式定义的映射: \[ y_{1} = -2x_{1} + x_{2}, \qquad y_{2} = x_{1} + x_{2}, \] 我们得到了 \(\boldsymbol{x}\) 和 \(\boldsymbol{y}\) 之间的函数关系。 这允许我们计算偏导数: \[ \frac{\partial y_{1}}{\partial x_{1}}=-2, \quad \frac{\partial y_{1}}{\partial x_{2}}=1, \quad \frac{\partial y_{2}}{\partial x_{1}}=1, \quad \frac{\partial y_{2}}{\partial x_{2}}=1. \]
将它们组合成雅可比矩阵: \[ \boldsymbol{J} = \begin{bmatrix} \frac{\partial y_{1}}{\partial x_{1}} & \frac{\partial y_{1}}{\partial x_{2}} \\ \frac{\partial y_{2}}{\partial x_{1}} & \frac{\partial y_{2}}{\partial x_{2}} \end{bmatrix} = \begin{bmatrix} -2 & 1 \\ 1 & 1 \end{bmatrix} \tag{5.66} \]
雅可比矩阵表示我们想要的坐标变换。 如果坐标变换是线性的(如我们的例子),那么它是精确的,(5.66)正好恢复了(5.62)中的基变化矩阵。 如果坐标变换是非线性的,雅可比矩阵则用一个线性变换局部地逼近这个非线性变换。 雅可比行列式的绝对值 \[ \left|\det(\boldsymbol{J})\right| = 3 \] 就是变换坐标时面积或体积的缩放因子。在我们的例子中,结果正好是 3。
向量值函数的梯度
给定: \[ \mathbf{f}(\mathbf{x}) = \mathbf{A} \mathbf{x} \] 其中:
- \(\mathbf{f}(\mathbf{x}) \in \mathbb{R}^M\)(输出是 \(M\) 维向量)
- \(\mathbf{A} \in \mathbb{R}^{M \times N}\)
- \(\mathbf{x} \in \mathbb{R}^N\)
这是一个线性映射:\(\mathbf{x} \mapsto \mathbf{A} \mathbf{x}\)。
向量值函数的梯度是 \(A\)。
5.4.1 反向传播与自动微分法
在许多机器学习应用中,我们通过执行梯度下降(第7.1节)来找到好的模型参数,这基于我们可以计算目标函数相对于模型参数的梯度。对于给定的目标函数,我们可以通过微积分和应用链式法则来获得关于模型参数的梯度;见第5.2.2节。在第5.3节中,我们已经研究了线性回归模型的平方损失函数的梯度。
反向传播是数值分析中称为自动微分(automatic differentiation)技术的一个特例。我们可以把自动微分看作是一套技术,它通过处理中间变量和应用链式法则,在数值上(而不是符号化地)计算函数的精确(达到机器精度)梯度。自动微分应用了一系列基本算术运算,例如加法和乘法,以及基本函数,例如:\( \sin , \cos , \exp , \log\)将链式法则应用到这些运算中,可以自动计算相当复杂函数的梯度。自动微分适用于一般的计算机程序,有正向和反向两种模式。
直观地说,正向和反向模式在乘法的顺序上是不同的。由于矩阵乘法的结合性,我们有以下两种选择: \[ \begin{equation} \frac{\mathrm{d} y}{\mathrm{d} x} = \left( \frac{\mathrm{d} y}{\mathrm{d} b} \frac{\mathrm{d} b}{\mathrm{d} a} \right) \frac{\mathrm{d} a}{\mathrm{d} x} \qquad (5.120) \end{equation} \]
\[ \begin{equation} \frac{\mathrm{d} y}{\mathrm{d} x} = \frac{\mathrm{d} y}{\mathrm{d} b} \left( \frac{\mathrm{d} b}{\mathrm{d} a} \frac{\mathrm{d} a}{\mathrm{d} x} \right) \qquad (5.121) \end{equation} \]
方程(5.120)是反向模式(reverse mode),因为梯度通过数据流向后传播。 方程(5.121)是正向模式(forward mode),其中梯度随数据从左到右流过整个图。
下面,我们将重点介绍反向模式的自动微分,即反向传播。
在神经网络中,输入的维数通常比标签的维数高得多,所以反向模式比正向模式计算量要少得多。
具体的例子详见《损失函数的梯度计算例子.md》
全书的读书笔记(共7篇)如下:
《机器学习的数学基础》读书笔记之一 :导言
《机器学习的数学基础》读书笔记之二 :线性代数
《机器学习的数学基础》读书笔记之三 :解析几何
《机器学习的数学基础》读书笔记之四 :矩阵分解
《机器学习的数学基础》读书笔记之五 :向量微积分
《机器学习的数学基础》读书笔记之六 :概率与分布
《机器学习的数学基础》读书笔记之七 :连续优化